Die Blog Oase
15.02.14

1.21 Gigawatt Leistung
Neben der berechneten Leistungsaufnahme meines Mendel90 interessieren natürlich die tatsächlichen Werte:
- Mit einem Leistungsmessgerät habe ich heute einen Druck von 6:45 h gemessen.
- Am Ende standen 0,79 kWh im Display.
- Das wären dann 790 Wh / 6,75 h = 117 W.
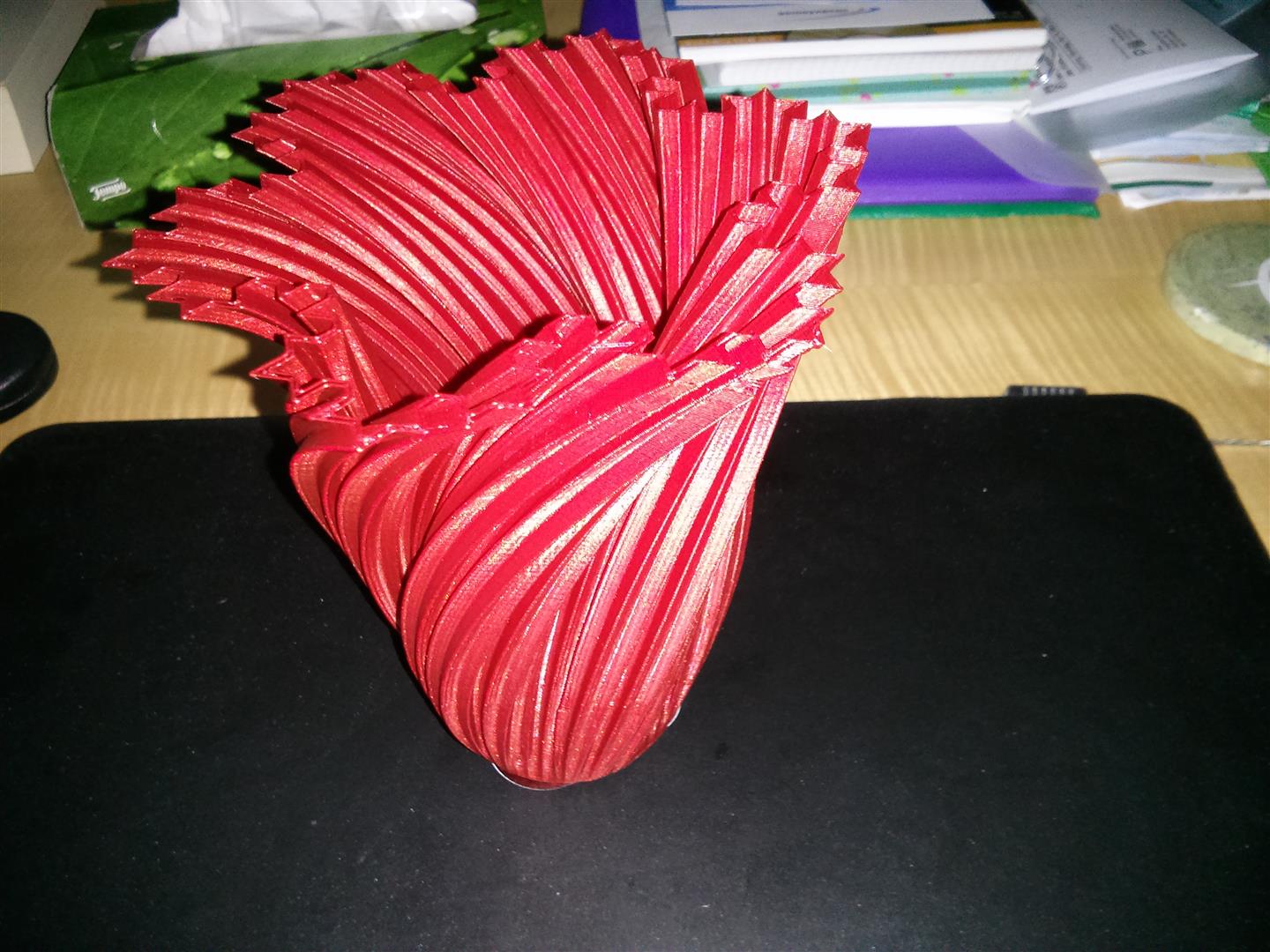
Gedruckt habe ich eine Vase in der Form einer Koch-Kurve in Faberdashery's Mercury Red. Hier ein Zeitraffer-Video.
09.02.14
Kein Kabelsalat mehr
Gestern habe ich gesehen, wie meine Freundin das Ladekabel ihres Handys aufwickelte. Natürlich blieb es nicht schön aufgewickelt. Es wurde ein Knäuel. Für's Büro habe ich vor kurzem diese Kabelclips gedruckt.

Wenige Minuten später war das Handykabel gebändigt.
Etwas später kam Sie zu mir mit Ihren Ohrhörern. Dafür gibt es ein spezielles Objekt zum drucken:

Die gibt es in 4 verschiedenen Größen vorbereitet. Meine Ohrhörer passen in "Medium", ihre in "Small" und "Extra Large". Für "Large" finden wir aber auch noch was passendes.
Wieviel Strom verbraucht so ein 3D Drucker?
Die elektrische Leistung berechnet sich (bei Gleichstrom) aus der Formel
Der Drucker setzt sich zusammen aus
- Heizbett

- Extruder
- Schrittmotoren - Obwohl es eigentlich 5 Schrittmotoren sind, werden hier die beiden Motoren der Z-Achse als einer betrachtet, da sie in Reihe geschaltet sind.
- Elektronik - diese besteht aus dem Melzi-Board (prinzipiell ein Arduino Mega) und dem Raspberry Pi. Hier sollten nicht mehr als eine handvoll Watt aufgenommen werden.
Macht zusammen maximal ca. 200W. Dieser Wert wird hauptsächlich am Anfang eines Drucks gemessen werden. Die Achsen fahren von der Home-Position zum Druckstart und das Heizbett und der Extruder werden von Raumtemperatur auf Drucktemperatur gebracht. Bis die Regelung einsetzt sind beide Verbraucher dauerhaft unter Strom. Anschließend wird über Pulse geregelt, was deutlich zu weniger Leistungsaufnahme führt. Ich habe bei meinem Drucker mittels einem (Aldi / Tchibo) Verbrauchsmessgerät die 200W in der Aufheizphase festgestellt. Während dem Druck ging der Messwert auf ca. 80W - 90W zurück.
12.12.13
Wie genau ist so ein 3D Drucker?
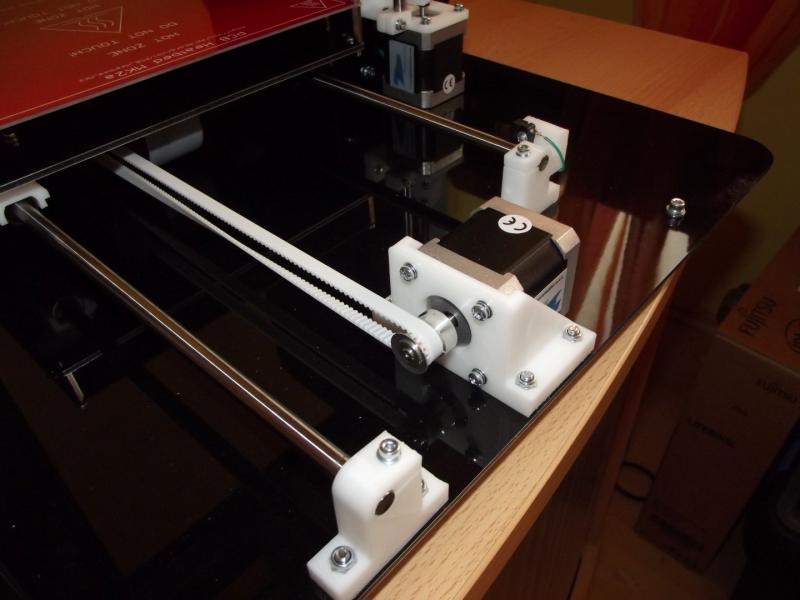
Immer wieder werde ich gefragt, wie genau so ein Drucker arbeitet. Ich habe deshalb einmal die theoretischen Gegebenheiten zur Genauigkeit berechnet. Zunächst muss man den mechanischen Aufbau der Achsen berücksichtigen. Die X- und Y-Achse sind mechanisch identisch aufgebaut:
- Der Schrittmotor treibt über ein Zahnrad mit 16 Zähnen einen Zahnriemen mit 2,5mm Zahnabstand.
- Pro Schritt dreht sich die Motorachse um 1,8°
- Mit der Treiberelektronik werden sog. Mikroschritte möglich. Damit erhält man 16 Mikroschritte pro Schritt
Damit kann man die Schritte pro mm ausrechnen:

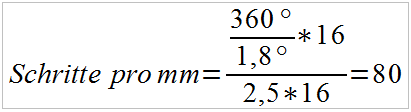
Das wären dann 0,0125mm Bewegung in X- oder Y-Richtung bei einem Mikroschritt.
Der Aufbau der Z-Achse ist anders:
- Der Schrittmotor ist direkt mit einer M6 Gewindestange verbunden.
- Pro Umdrehung bekommt man 1mm Hub bei einem M6 Gewinde
- Pro Schritt dreht sich die Motorachse um 1,8°
- Mit der Treiberelektronik werden sog. Mikroschritte möglich. Damit erhält man 16 Mikroschritte pro Schritt
Damit kann man die Schritte pro mm ausrechnen:


Das wären dann 0,0003125mm Bewegung in Z-Richtung bei einem Mikroschritt.
02.12.13
Ein zweistufiges Planetengetriebe (Übersetzung 16:1)
Auf meinen Streifzügen durch das "Universum der Dinge" (Thingiverse) habe ich ein paar "Dinge" gesehen, die ich einfach auch einmal drucken muss. Seitdem ich fast kein LEGO Technic mehr habe, sind hier viel zu wenig Zahnräder in der Wohnung.
Da dürfte ein zweistufiges Planetengetriebe ein wenig für Ausgleich sorgen. Der Konstruktuer dieses "Dings" hat neben den .stl Dateien auch die .scad Quellen und alle nötigen Bibliotheken hochgeladen.
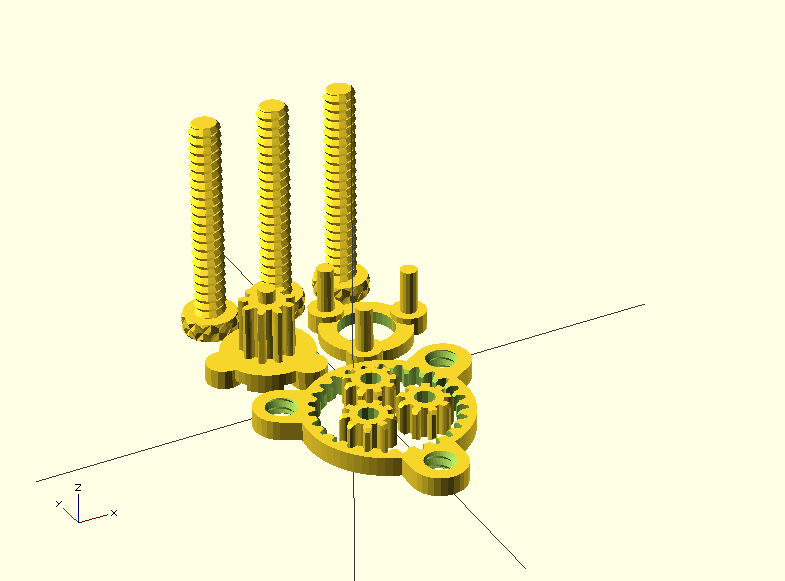
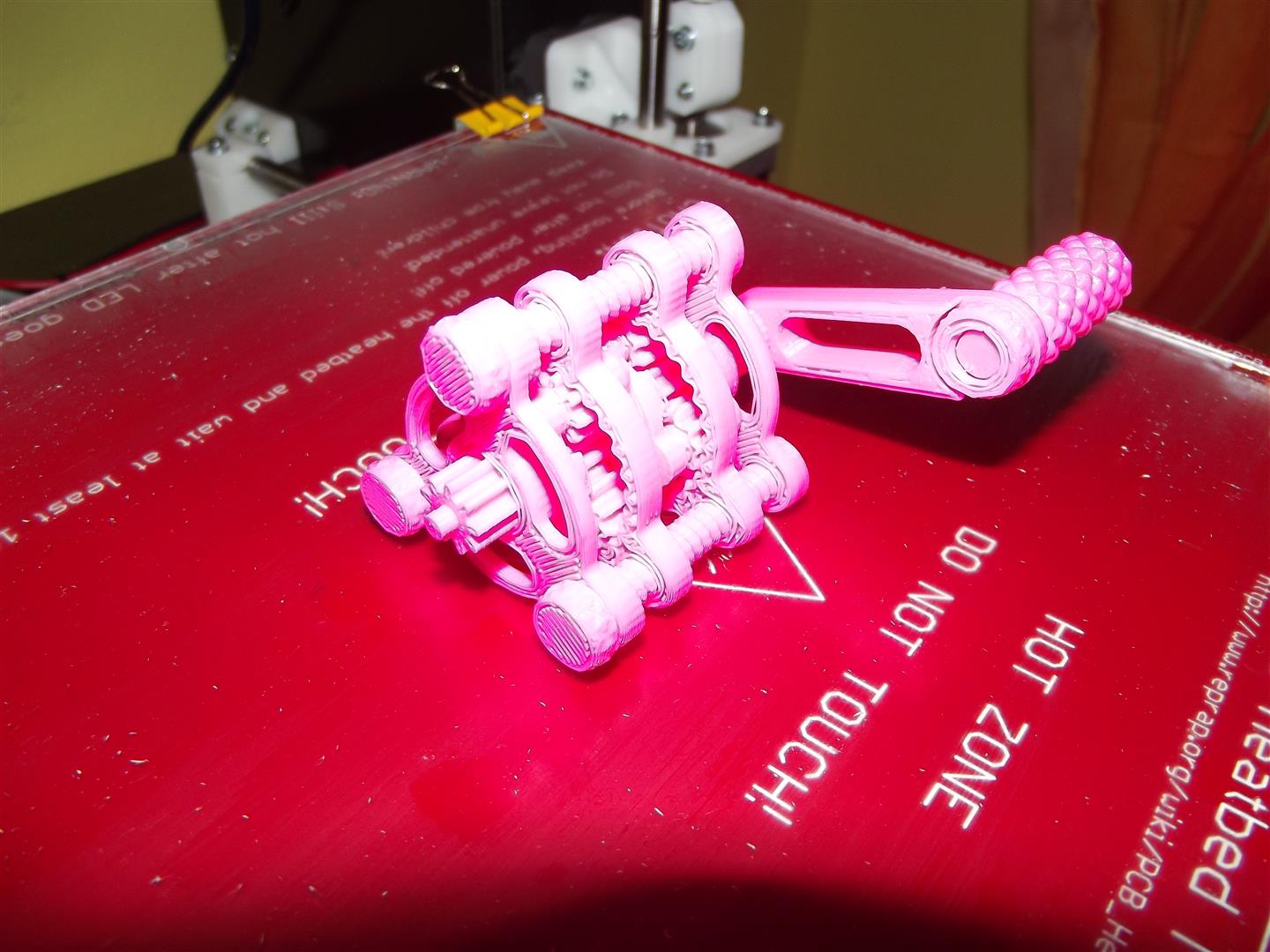
Damit ist man in der Lage, soviele Stufen wie man möchte zu drucken. Die Länge der Bolzen wird dabei gleich korrigiert. Ein fertig gedrucktes Set für ein zweistufiges Getriebe sieht nach dem Drucken so aus:
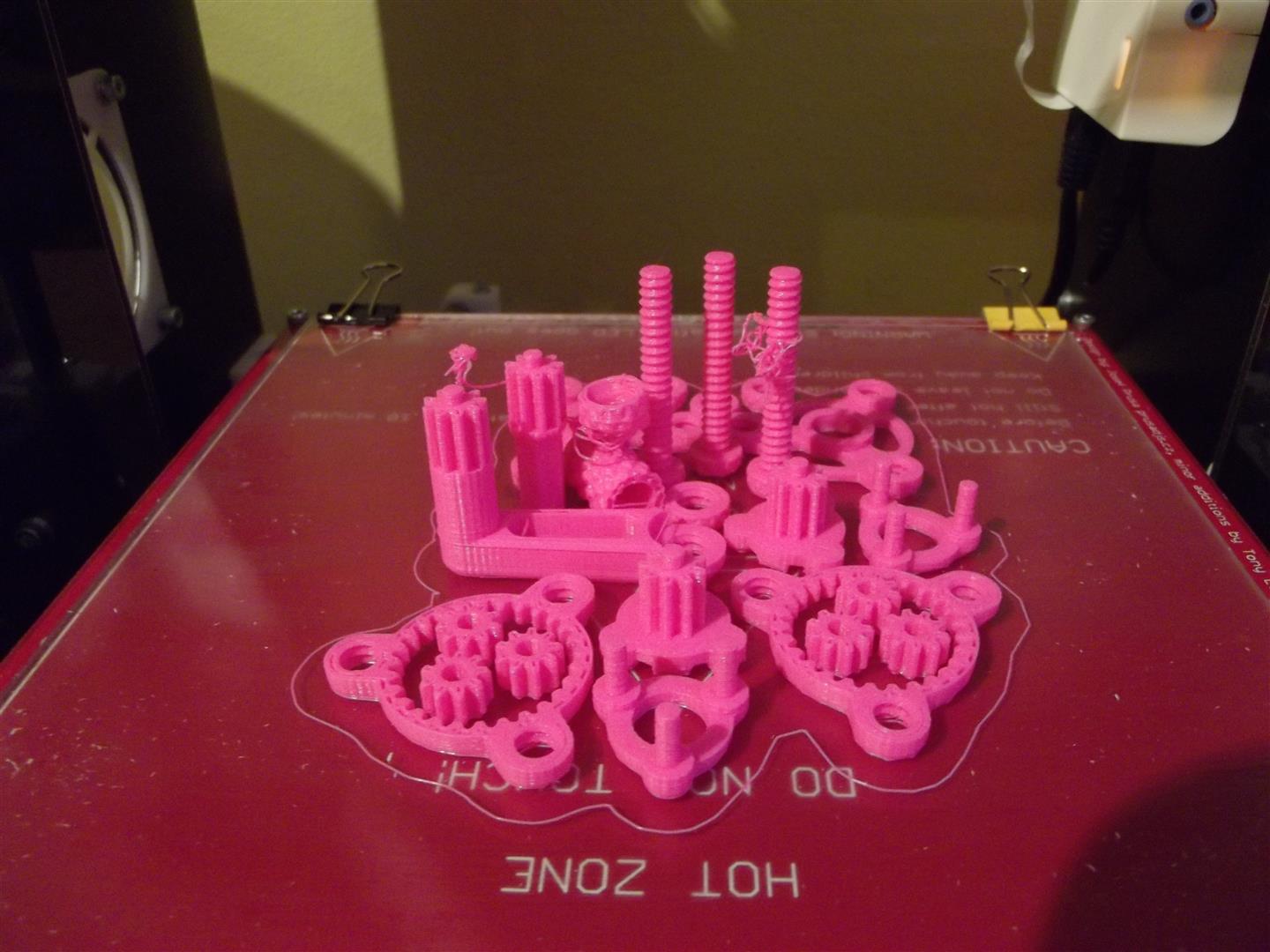
Unglücklicherweise sind zwei Teile der Kurbel nichts geworden, die mussten einzeln nochmal gedruckt werden. Ausserdem habe ich alle Teile um 25% vergrößert.
Und so sieht das fertige Getriebe aus:
25.11.13
Modifizierte Kamera für OctoPi
Die hier beschriebene Modifikation an meinem 3D Drucker benötigte einen längeren Vorlauf. Es geht um die Kamera am Raspberry Pi. Genauer um die Brennweite der Linse. Der Hersteller hat die Kamera so gebaut, dass ab einem Abstand von ca. 48cm die Bilder scharf sind. Dieser Abstand ist an meinem Drucker viel zu groß.
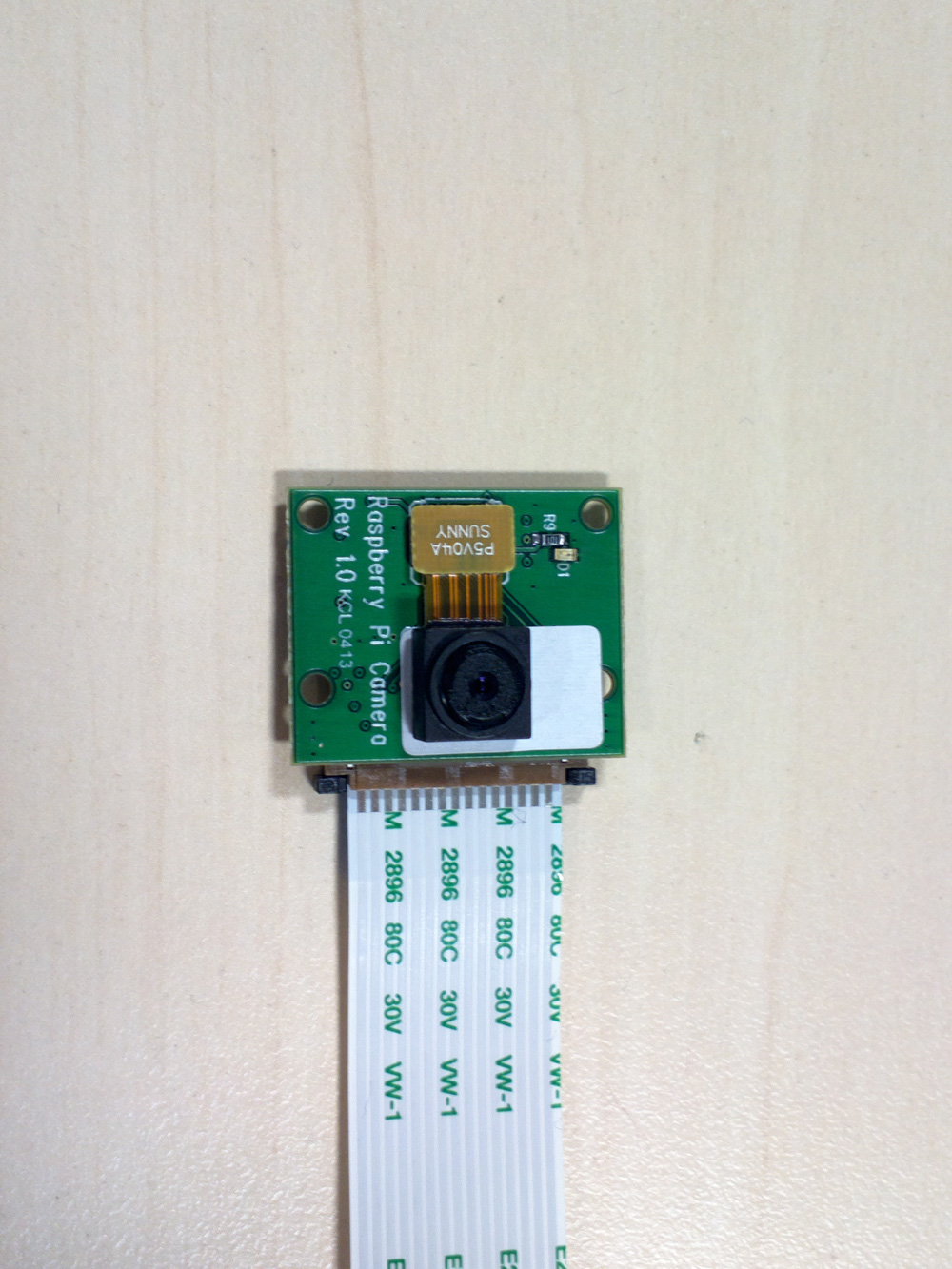
Um die Brennweite der Linse zu ändern kann man entweder die verwendete Linse selbst auswechseln, oder eine zusätzliche Linse davor anbringen. Geeignete Linsen gibt es z.B. hier:

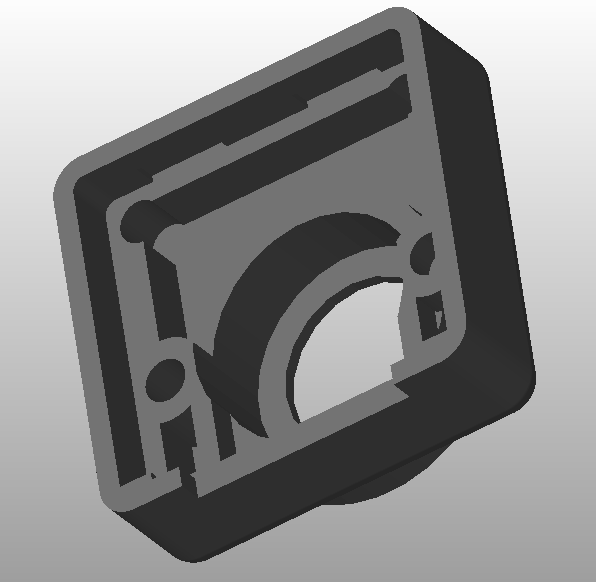
Diese Linsen gibt es in diversen Brennweiten - ich habe die OM3, OM4 und OM5 besorgt. Die Kamera selbst steckt in einem gedruckten Gehäuse. Ich musste das ursprüngliche Design

ein wenig ändern, damit die Linse eingebaut werden kann:

Der OpenSCAD-Code für die neue Gehäusefront sieht so aus:
/* Raspicam-Gehäuse mit Linse Quellen: http://www.thingiverse.com/thing:92208 (RaspiCam-Gehäuse) http://astromedia.eu/Material-fuer-Selbermacher/OPTI-Media-Acryglas-Linsen:::10_15.html (Acrylglas-Linsen 16,5mm) */ $linse_d=16.5; $linse_h=3.6; $loch_mitte_x=15; $loch_mitte_y=12; difference(){ gehause_linsenhalter(); linse(); } // Gehäuse + Linsenhalter module gehause_linsenhalter() { gehaeuse(); linsenhalter(); } module gehaeuse() { import("raspberri_pi_camera_case_front_v0.4.2.STL"); } module linsenhalter() { difference() { translate([$loch_mitte_x,$loch_mitte_y,-3]) cylinder(h=$linse_h + 3,r=$linse_d / 2 + 2); translate([$loch_mitte_x,$loch_mitte_y, -4]) cylinder(h=$linse_h + 5,r=$linse_d / 2 - 2); } } module linse() { translate([$loch_mitte_x,$loch_mitte_y,-2]) cylinder(h=$linse_h + 10.5,r=$linse_d / 2 + 0.2); }
Heraus kommt diese modifizierte Front mit der Möglichkeit, eine Linse aufzunehmen:
Um die Kamera am Drucker zu fixieren, habe ich mir eine Schwanenhals-Halterung besorgt. Diese musste ich ebenfalls umbauen. Das Original hat am einen Ende einen Klinkenstecker:

Damit ist natürlich keinerlei Fixierung möglich. Am Raspberry Pi eingesteckt würde man auch noch den Sound-Ausgang verlieren - was in dieser Verwendung natürlich unerheblich ist. Den Klinkenstecker habe ich ausgebohrt und mit einer M3 Schraube ersetzt:

Damit lässt sich die Kamera wunderbar am Drucker befestigen:
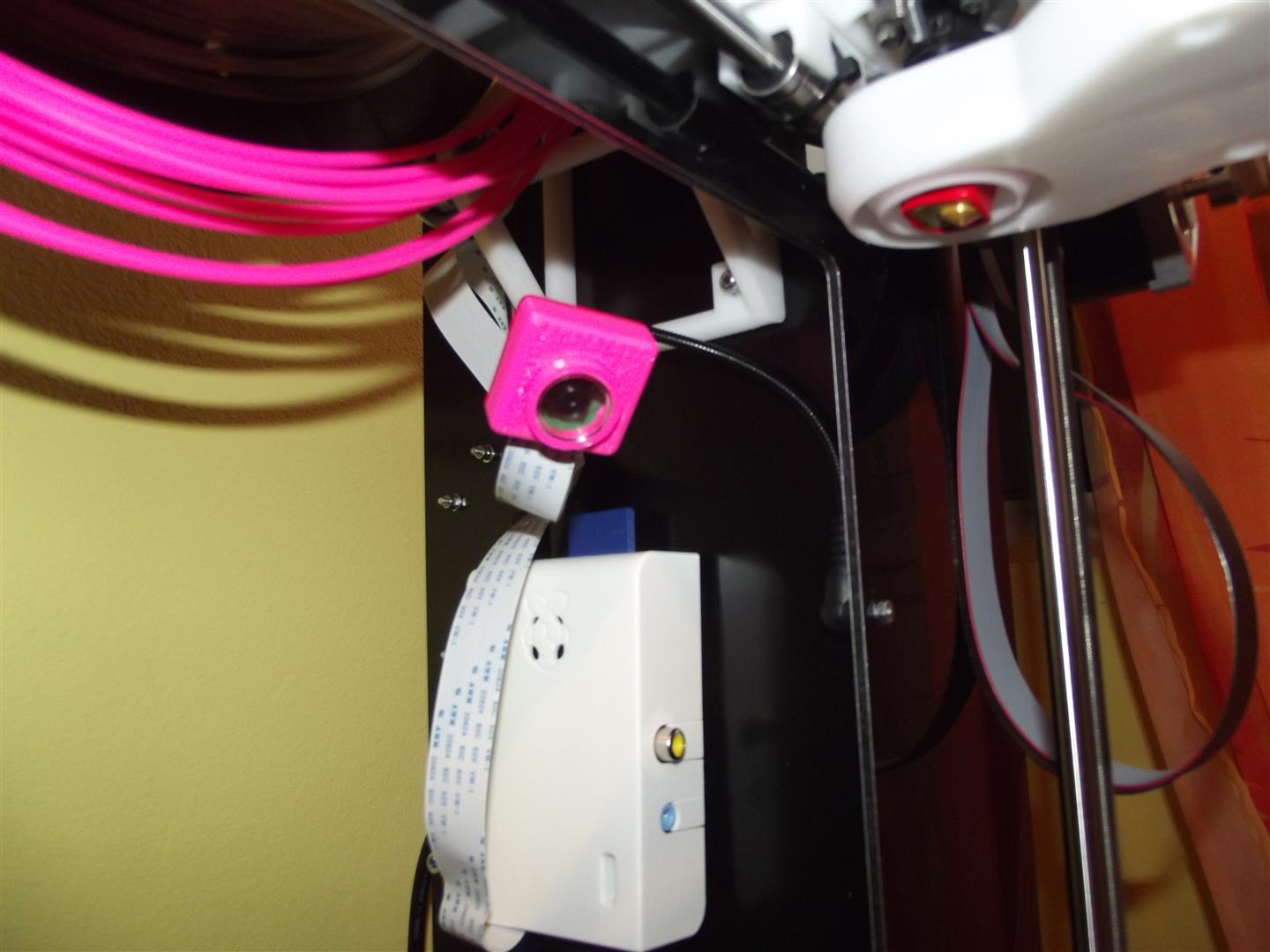
Ich bin mit dem Ergebnis noch nicht zufrieden - aber es ist ein Anfang.
19.10.13
Auftragsarbeit
Heute musste mein Mendel90 für Andere arbeiten. Es wurden 2 Gehäuse für einen Raspberry Pi gewünscht. Ich nutzte die Gelegenheit auch gleich, um erstmalig 2 Objekte gleichzeitig zu drucken. Das Ergebnis sieht man hier:
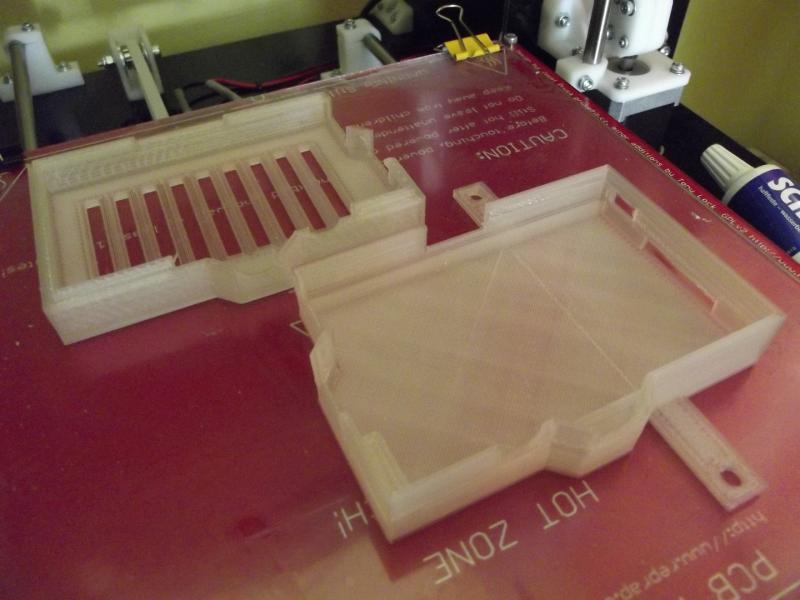
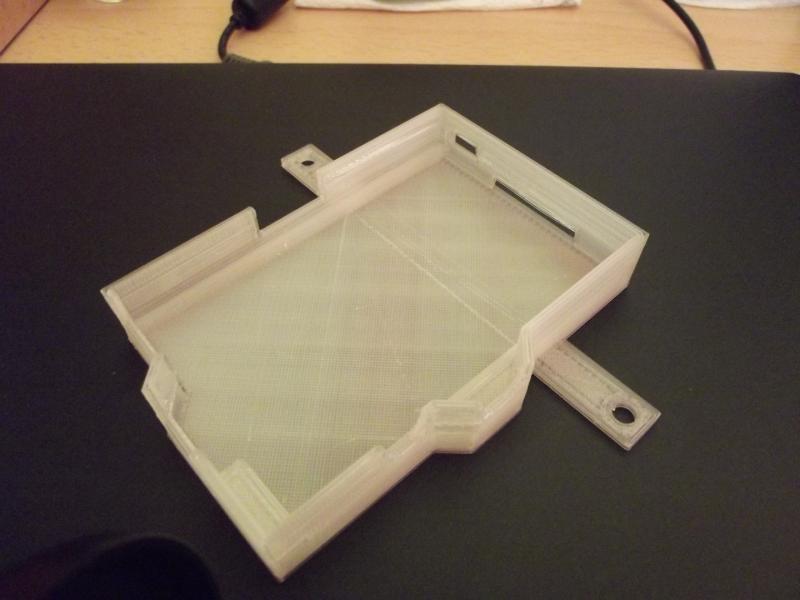


Der Raspberry passt perfekt! Für das Gehäuse wurden 5,4m Filament (transparent) verbraucht. Der Druck dauerte fast 3h. Das zweite Gehäuse in "buttercreme" druckt hier.
11.10.13
Ein zweites Hirn schadet nicht ...
Gestern habe ich meinem Mendel 90 ein zweites Hirn verpasst. Nachdem der Druck in der vorigen Nacht zufriedenstellend gelaufen ist, soll der Raspberry Pi nun einen festen Platz am Drucker bekommen.
Ich muss den Platz so wählen, dass die Kamera einen guten Blick auf das Druckbett bekommt. Leider ist jeweils der interessante Teil während dem Drucken vom Druckkopf verdeckt ...

Die rechte Seitenwand hat zufällig im genau richtigen Abstand zwei Schrauben, die prima in die Aufnahme vom Raspberry-Gehäuse passen.
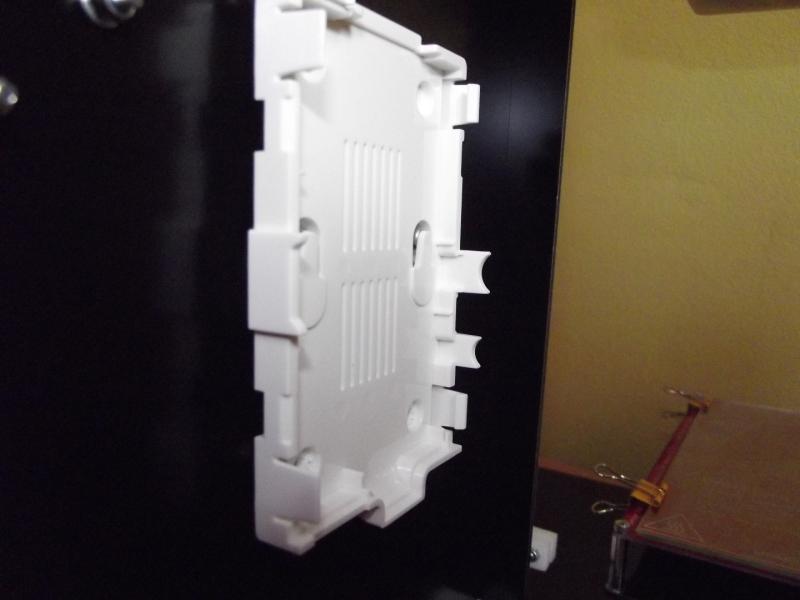

Ein paar Augenblicke später war der Pi verdrahtet.

Als nächstes wird die Kamera fixiert.
10 Stunden und 33 Minuten / 30m Filament

Soeben ging die Bewährungsprobe für den Raspberry Pi mit Octoprint/OctoPi zu Ende. Nach 10 Stunden und 33 Minuten waren 30m Filament in "Glacial Blue" verdruckt.
Damit ist mein Mendel90 jetzt in der Lage, autonom zu drucken. Als nächstes muss ich eine gute Stelle für die PiCam suchen, so dass ich auch in der Lage bin, Zeitrafferfilme zu erstellen.
Heraus gekommen ist ein Dock für ein Nexus4 Smartphone.

Bei einem Preis von £0,35 pro Meter kommt das Teil auf €12,40 Materialkosten. Mal sehen, ob ich das als "Auftragsarbeit" für Werner bezahlt bekomme ...
08.10.13
Wie lange hat der Zusammenbau gedauert?
Ich wurde mehrmals gefragt, wie lange man für den Zusammenbau des Druckers braucht. Ich habe das nun mal halbwegs überschlagen. In der Aufstellung sind aber sicher mehrere Stunden Abweichung möglich:
- 2h Inventur aller Teile
- 2h 4. X Idler Assembly, 5. X Motor Assembly (teilweise)
- 6h 2. Frame Assembly, 3. Bed Fan Assembly, 5. X Motor Assembly (fertig), 6. Z Motor Assemblies
- 6h 7. Z Axis Assembly, 8. Y idler assembly, 9. Y motor assembly, 10. Y Carriage Assembly, 12. Print bed assembly
- 6h 13. Y Axis Assembly, 14. X Carriage Fan Assembly, 15. X Carriage Assembly, 16. Hot end assembly, 17. Extruder connection pcb assembly, 18. Extruder Motor Assembly, 19. Extruder Assembly, 20. X Axis Assembly
- 2h Fehlerkorrekturen, 21. Spool holder assembly, 22. PSU assembly (teilweise)
- 3h 22. PSU assembly (fertig), 23. Electronics Assembly (teilweise)
- 2h 23. Electronics Assembly (fertig), 24. Software, 25. Testing
- 4h 26. Calibration
Macht zusammen ca. 33h.
Die Blog Oase
Die Blog Oase ist ein sehr spezielles Blog! Es vereinigt automatisch alle Einträge der anderen Blogs. Das erlaubt dir, ganz einfach alles zu verfolgen, was in diesem System geschrieben steht.
| Mo | Di | Mi | Do | Fr | Sa | So |
|---|---|---|---|---|---|---|
| << < | > >> | |||||
| 1 | 2 | 3 | 4 | 5 | 6 | 7 |
| 8 | 9 | 10 | 11 | 12 | 13 | 14 |
| 15 | 16 | 17 | 18 | 19 | 20 | 21 |
| 22 | 23 | 24 | 25 | 26 | 27 | 28 |
| 29 | 30 | |||||
Suche
Kategorien
Die Blog Oase
Blog A Titel
- Announcements [A] (0)
- Background (0)
- News (0)
Blog B Titel
- Announcements [B] (0)
- b2evolution Tips (0)
- Fun (0)
- In real life (0)
- On the web (0)
Linkblog Titel
- b2evolution (0)
- contributors (0)
ChaoS Blog
- Allgemeines (2)
- Der Umbau (12)
beluga-bbs blog
- Allgemeines (9)
- Essen+Trinken (0)
- Restaurants (1)
- Warenkunde (1)
- Musik (0)
- Celebrities (0)
- Klatsch und Tratsch (1)
Bastard Blog
- Büroalltag (2)
- privat (48)
RechtsAnwalt-STeuerberater Blog
- Berateralltag (26)
Robin Blog
- JustLinks (0)
Archive
- September 2014 (1)
- August 2014 (2)
- Juni 2014 (2)
- Mai 2014 (1)
- April 2014 (2)
- Mõrz 2014 (1)
- Februar 2014 (4)
- Dezember 2013 (2)
- November 2013 (1)
- Oktober 2013 (9)
- September 2013 (17)
- August 2013 (1)
- Mehr...
Linkblog
Sonstiges
 XML Feeds
XML Feeds
- RSS 0.92: Eintrõge, Kommentare
- RSS 1.0: Eintrõge, Kommentare
- RSS 2.0: Eintrõge, Kommentare
- Atom: Eintrõge, Kommentare
Wer ist online?
- Gõste: 13
powered by
![]()